
Полностью замкнутый контур управления сервоприводом Accurax G5
Часто задают вопрос – как правильно организовать полностью замкнутый контур управления сервоприводом Accurax G5 с внешним энкодером?
Специалисты компании Ракурс и инженер компании Омрон Эдуард Шагиев подготовили подробный ответ.
Постановка задачи: реализация управления с полностью замкнутым контуром (ПЗК) для высокоточного контроля, за счёт использования внешнего энкодера.
Использование сигнала обратной связи от внешнего энкодера, установленного непосредственно на исполнительном органе, позволяет избежать рассогласования между заданием и реальным положением и скоростью конечного механизма. Основными причинами рассогласования в механизмах могут стать: люфты в механике, неизбежные погрешности на длине шариково-винтовой пары, температурные сдвиги, смещение продукта и т.п.
Решение: сервопривод Accurax G5 cо специальным входом для подключения внешнего энкодера (CN4). Схема управления представлена на рисунке ниже:
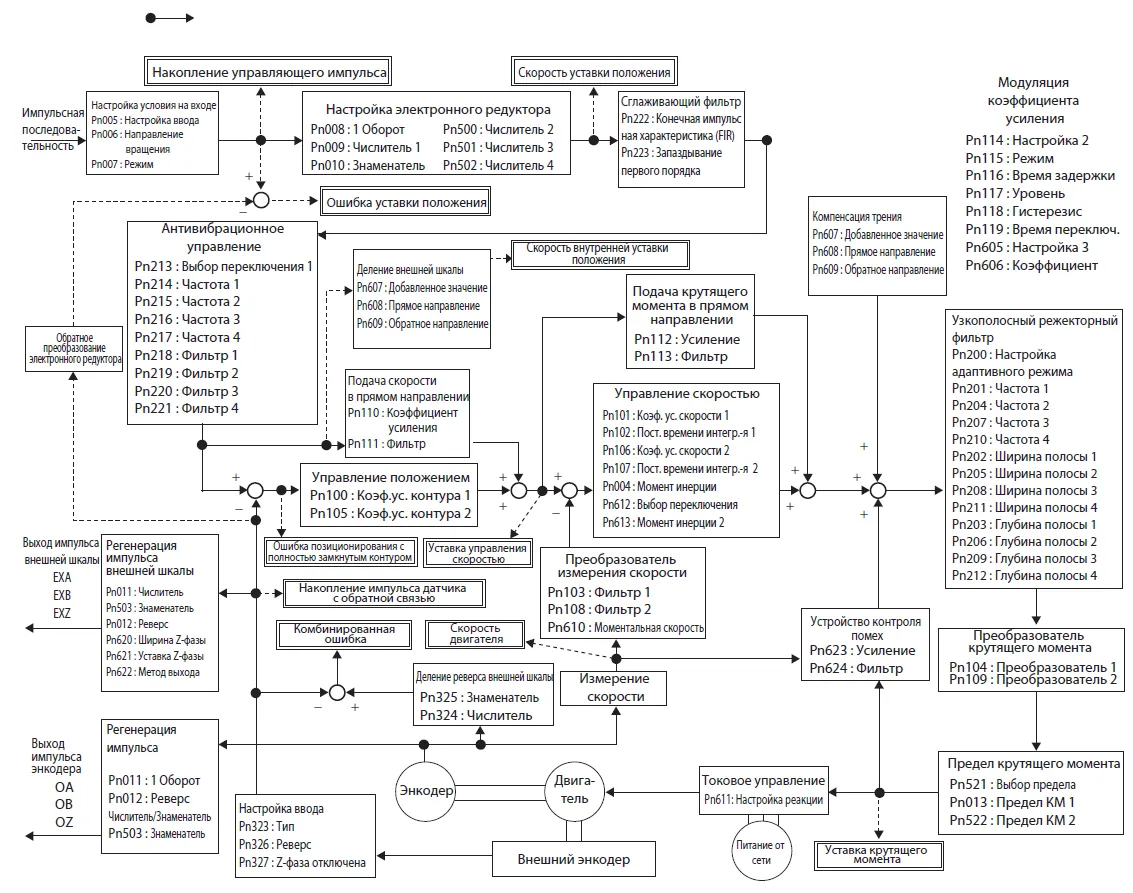
Необходимо подключить энкодер в соответствии со схемой. Тип поддерживаемого сигнала: TTL (он же Line-Driver, он же RS422, он же усилитель-формирователь) – уровень сигнала 5В, сигналы комплементарные.
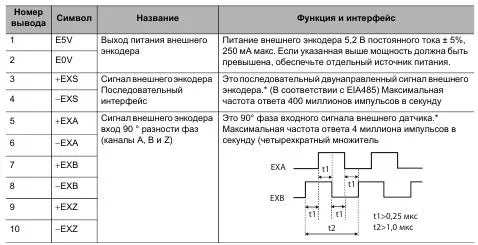
CN4
Список входных/выходных сигналов энкодера.
ВАЖНО! Настоятельно не рекомендуем, без крайней необходимости, самостоятельно распаивать любые кабели связи с энкодером. Разъёмы имеют малый размер и в 70% случаев заказчики допускают ошибку при распайке, что ведёт к потере времени и денежных средств.
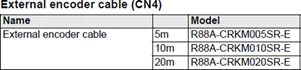
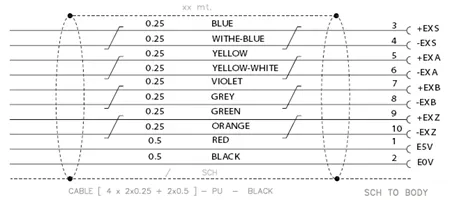
R88A-CRKMxxxSR-E Кабель подключения внешнего энкодера к CN4 (распайка).

Выходные жилы кабеля:
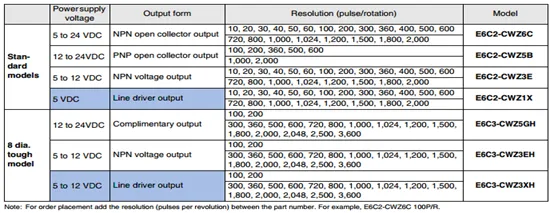
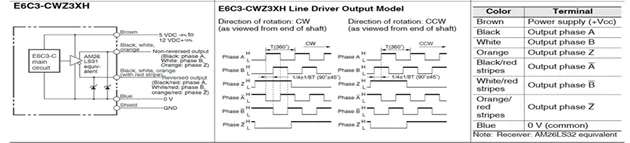
Энкодер
Тип сигнала TTL (Line Driver) – 5 В.

Как пример выбран экнкодер E6C3-CWZ3XH- 2000 имп/об.
Расчёт количества входящих импульсов в G5
Количество импульсов внешнего энкодера умножается на 4:
Пример: E6C3-CWZ3XH- 2000 имп/об.
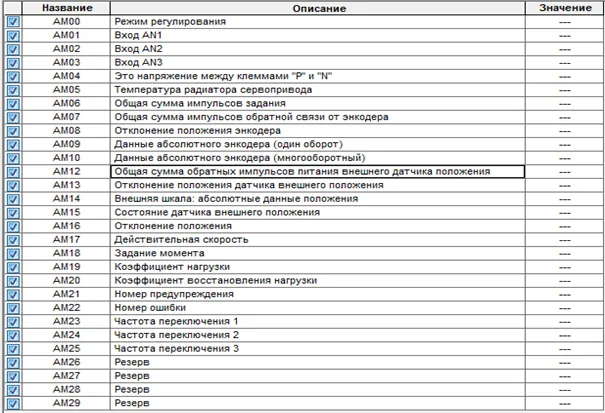
AM12- Общая сумма обратных импульсов питания внешнего датчика положения
AM12= 2000 x 4 =8000;
Настройка G5 для работы в полностью замкнутом контуре
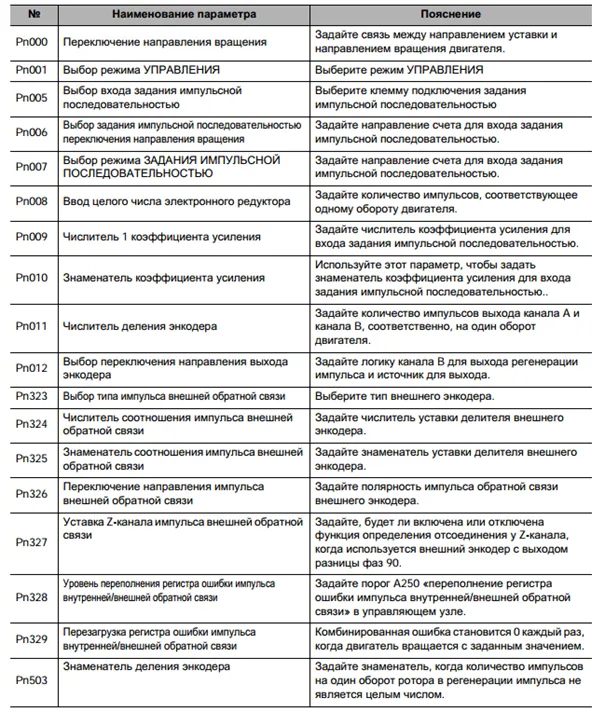
Основные параметры требующие настройки:
Шаг_1: Параметры Pn001 устанавливаем = 6 (ПЗК).
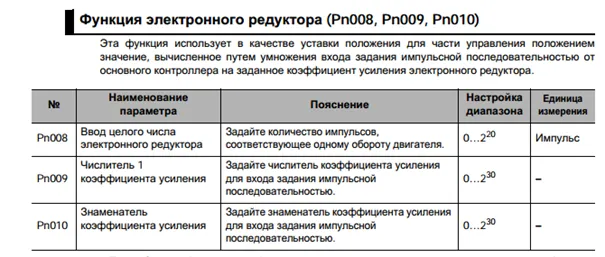
Шаг_2: Настройка электронного редуктора:
При работе в полностью замкнутом контуре параметр Pn008 устанавливается равным 0 (по умолчанию = 10000), в дальнейшем настраиваются только коэффициенты электронного редуктора Pn009 и Pn010;
Пример: E6C3-CWZ3XH- 2000 имп/об.
![]()
Pn008:=0;
Pn009: = 8000, так как 2000 x 4 (Количество импульсов внешнего энкодера на оборот).
Pn010:= 3000 (Количество импульсов на оборот), так как скорость двигателя 2000 об/ мин. и выход ПЛК 100КГц.
Pn010:= (2000/60)*3000, что тождественно 100КГц.
Шаг_3: Настройка коэффициентов деления импульса обратной связи:
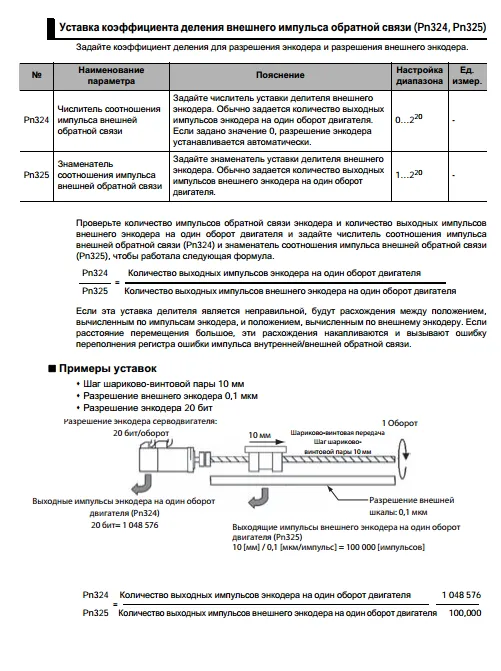
Пример:
Pn324:= 0(Автоматический выбор) или разрядность внутреннего энкодера 2^20= 1048576
![]()
Pn325:=8000:
Шаг_4: Выбор направления счёт внешнего энкодера:
Параметр Pn326;
![]()
Направление счёта внешнего и внутреннего энкодера должны совпадать.
Задайте направление вращения внешнего энкодера так, чтобы прямой счет происходил, когда вал двигателя вращается в направлении «против часовой стрелки», а обратный отсчет – когда вал двигателя вращается в направлении «по часовой стрелке». Если направление соединения нельзя выбрать из-за условий установки и т.п., направление счета можно реверсировать с использованием переключения направления внешнего импульса обратной связи(Pn326).
- Примите во внимание, что если Pn000 = 1 – направление счета энкодера становится противоположным направлению счета, которое используется для отслеживания всех импульсов обратной связи внешнего энкодера, и т.п.
ЕслиPn000 = 0 – направление счета соответствует направлению счета для отслеживания.
- Даже когда скорость привода находится в заданном диапазоне, произойдет ошибка превышения скорости, если скорость вращения вала двигателя превышает максимальную скорость.
- Для проверки задания направления вращения используйте монитор передней панели или функцию мониторинга в CX-Drive, с помощью которых осуществите проверку направления счета всех импульсов обратной связи внешнего энкодера и всех импульсов обратной связи встроенного энкодера. Если они совпадают, то соединение задано правильно.
Прочие параметры, на которые стоит обратить внимание:
При наладке используется аналоговый монитор:
Параметры:
![]()
![]()
В итоге мы получаем полностью замкнутый контур управления сервоосью.
Надеемся, что эта небольшая заметка поможет Вам в дальнейшем при работе с сервоприводами Accurax G5. Настраивайте привод правильно, всегда проводите расчеты момента инерции, составляйте диаграммы нагружения/ циклограммы работы и да прибудет с вами электрическая сила!